1.设计背景
在我们人类赖以生存的海洋,存在这样一个无形的杀手——塑料垃圾和渔网,海洋生物因吃下塑料垃圾导致胃部不消化,而逐渐死去,也因被渔线缠身,逐渐失去自由。这些可恶的海洋垃圾靠人类的力量去清理,工程尤为庞大,因此我想发明出一个自动清理海洋里悬浮塑料垃圾、渔网的潜水装置,改善我们的海洋环境。
2.设计目的
一是清理水下的渔网、渔线; 二是清理水下悬浮、较大的垃圾。 三能遥控、自主运行、识别夹取和存储垃圾。
3.设计的基本思路
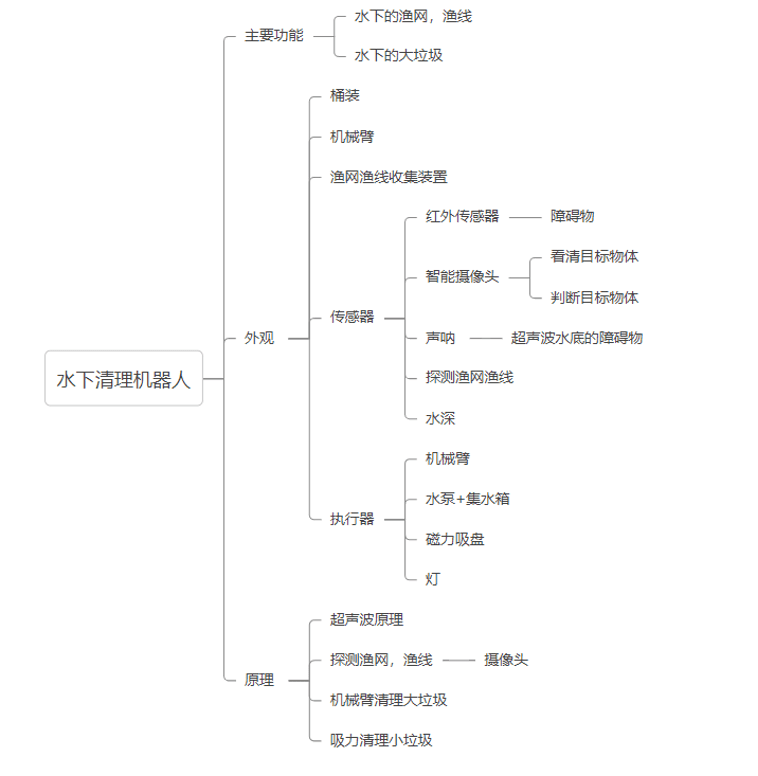
4.实施过程与步骤
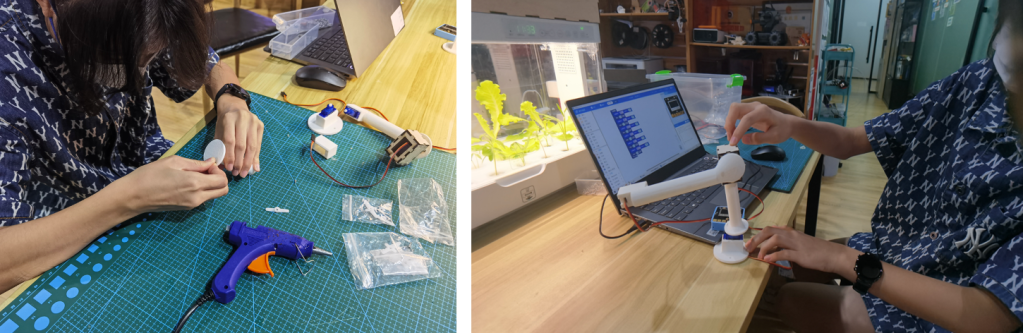
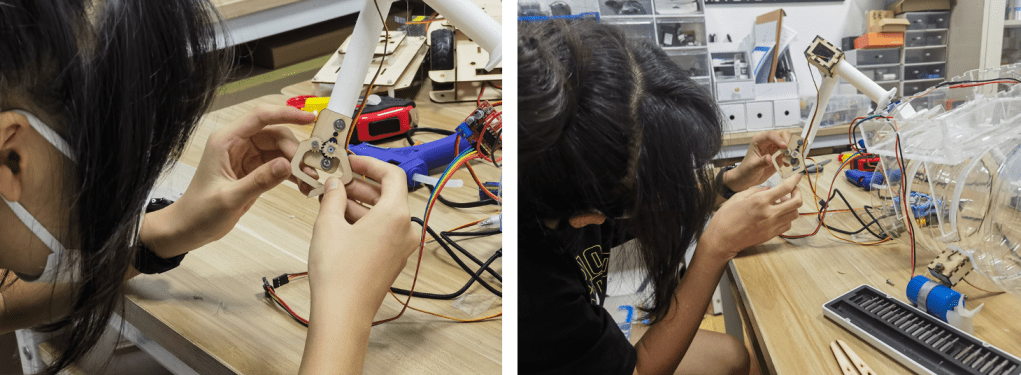
1.设计和制作第一代机器人的机械臂外观

2.打印和拼装,并调整尺寸

3.测试和安装机械臂,并完成机械臂部分的编程和调试。
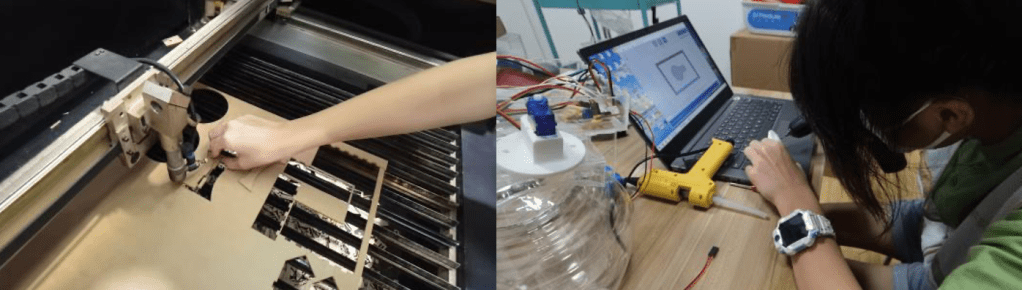
4.完成机械臂的制作之后,选择矿泉水空桶制作机器人外观作为样品,切割安装零件
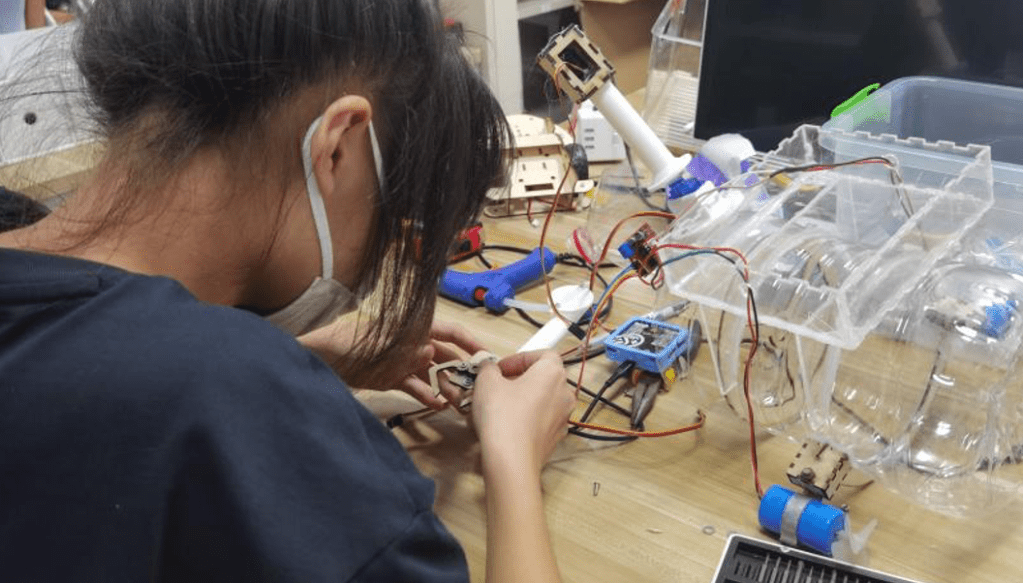
5.切割设计和制作机械臂手抓部分,并完成在机器人上的安装
6.安装主控板,调试舵机、推进器的功能
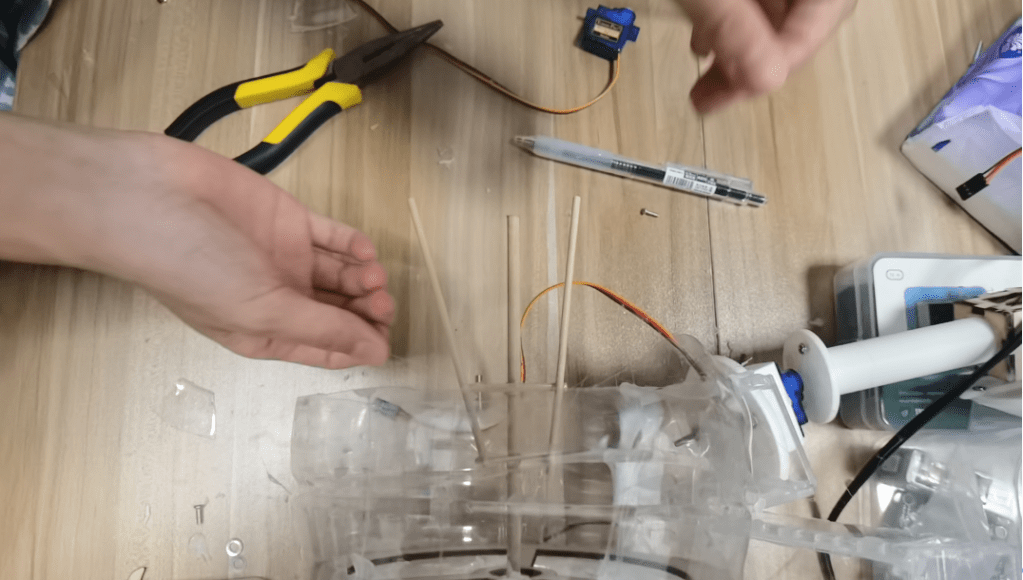
7.制作缠绕渔网的鱼叉,最终完成第一代制作
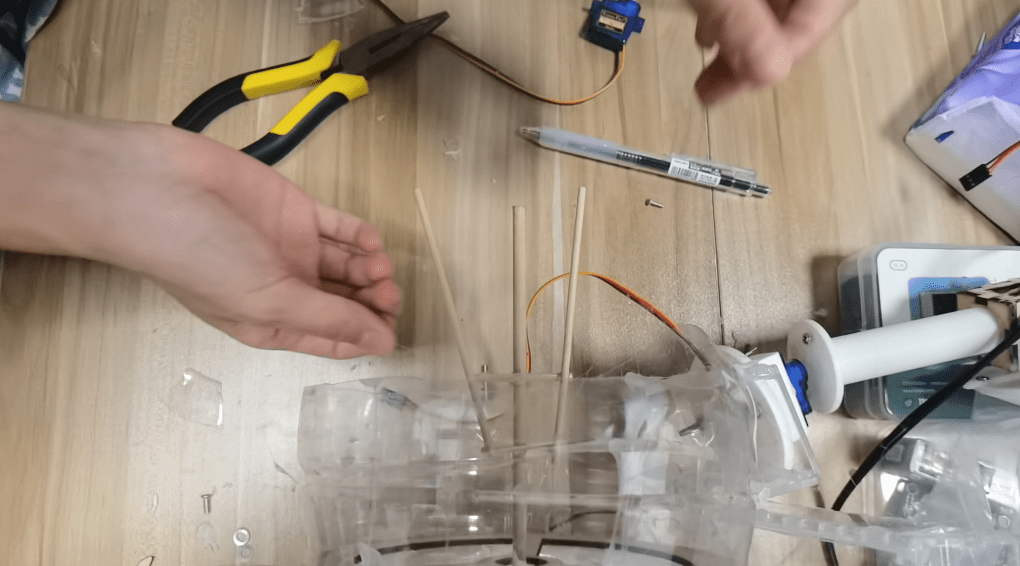
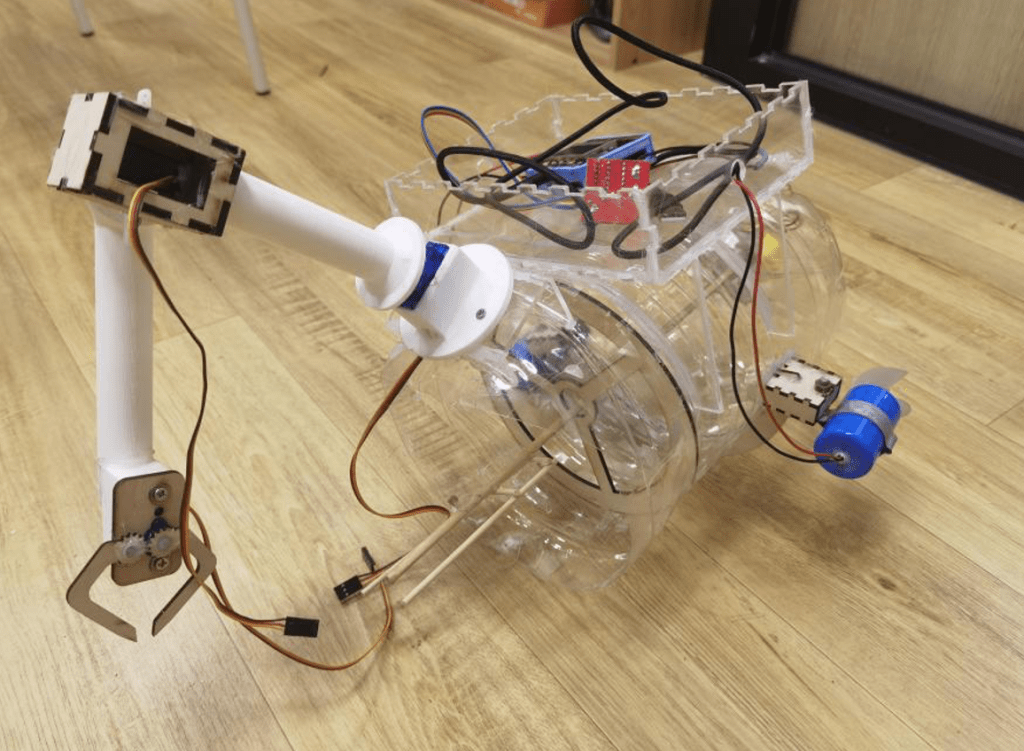
8.总结塑料外壳拼装过程中外形外观不稳定,密封性差等问题,设计并制作第二代作品。
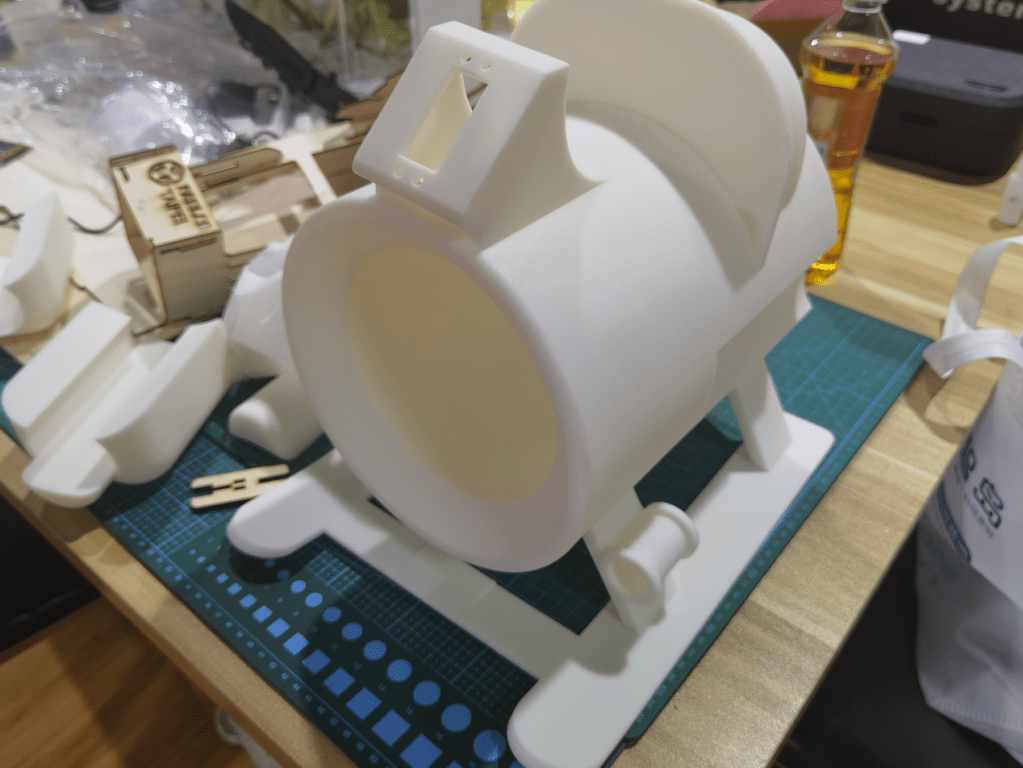
9.发送给工厂进行定制打印如下
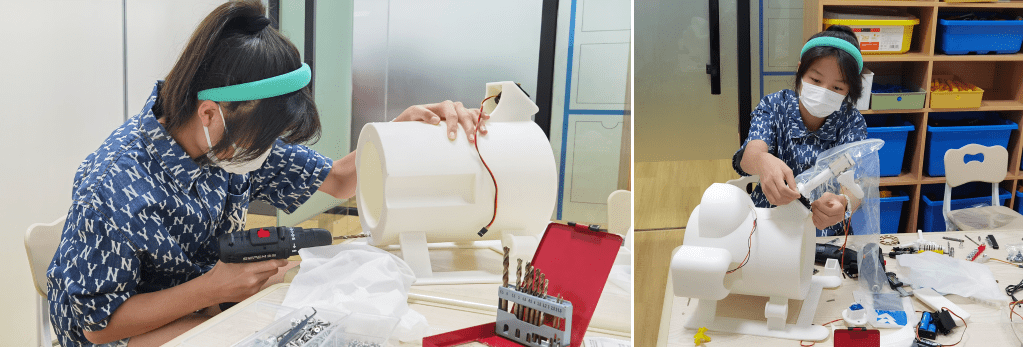
10.钻孔安装导管,安装机械臂,制作防水
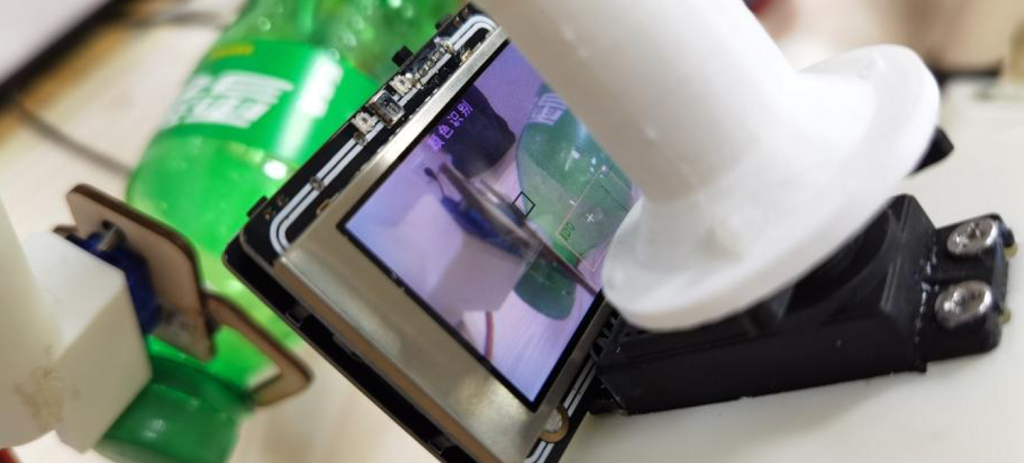
11.编程和调试智能摄像头的功能
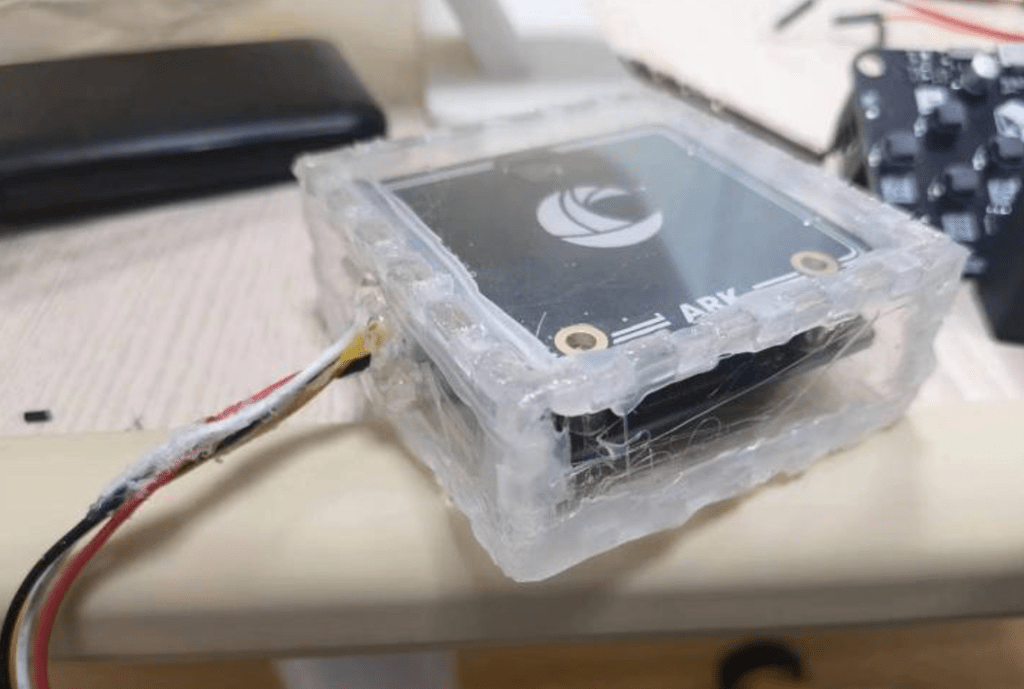
12.做好摄像头防水
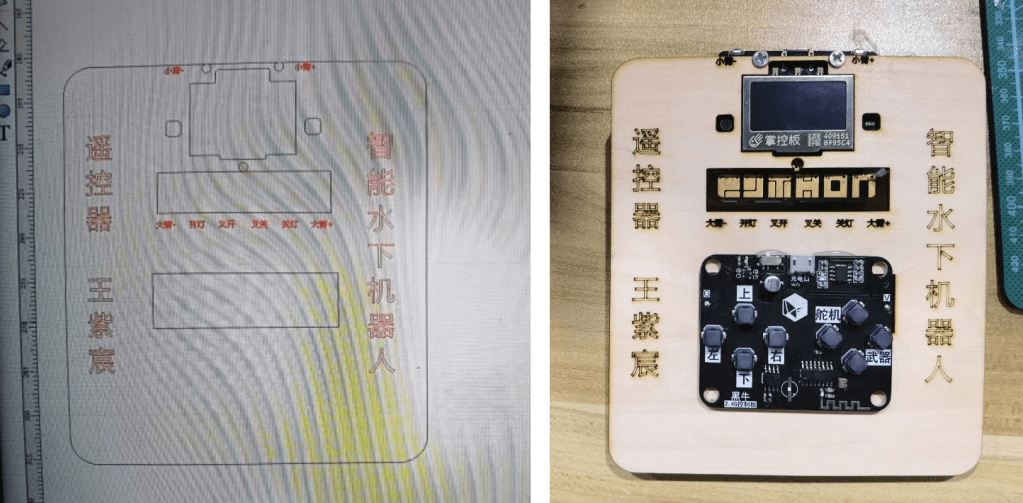
13.设计和制作遥控器
14.户外实验前的调试和防水工作

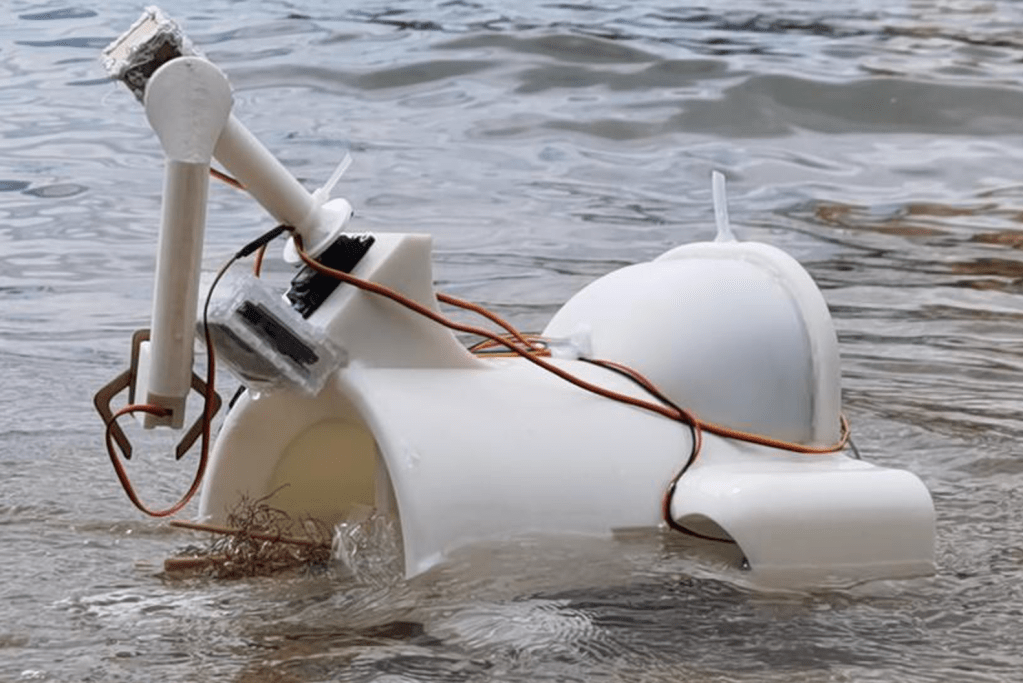
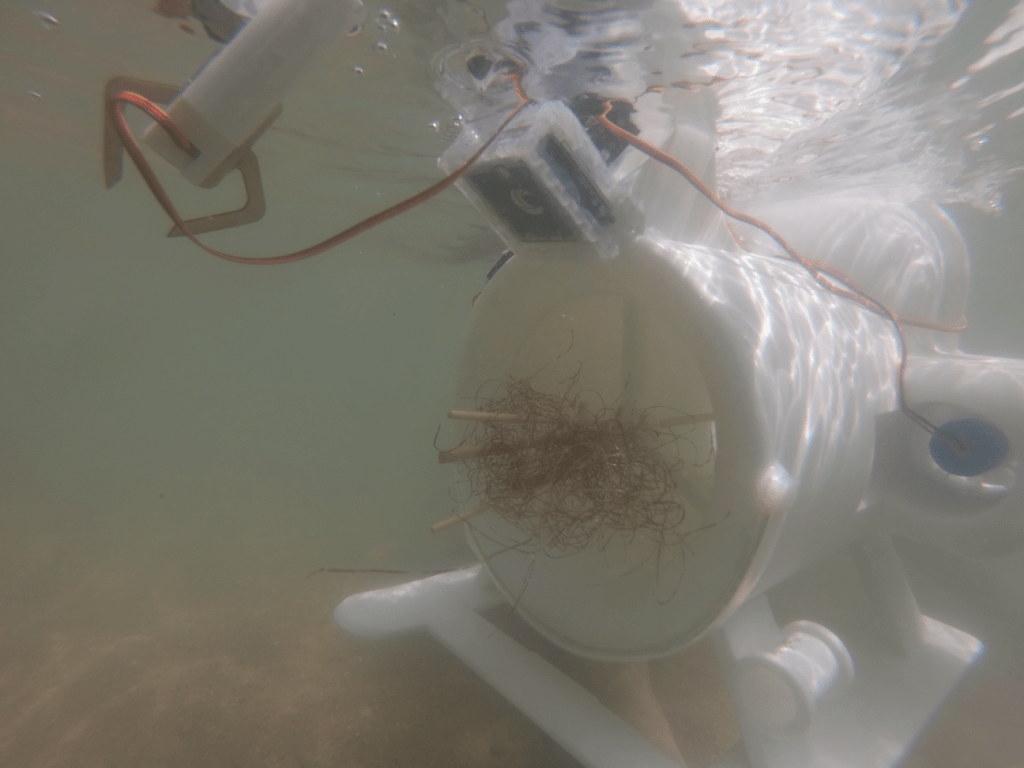
15.水下工作情景
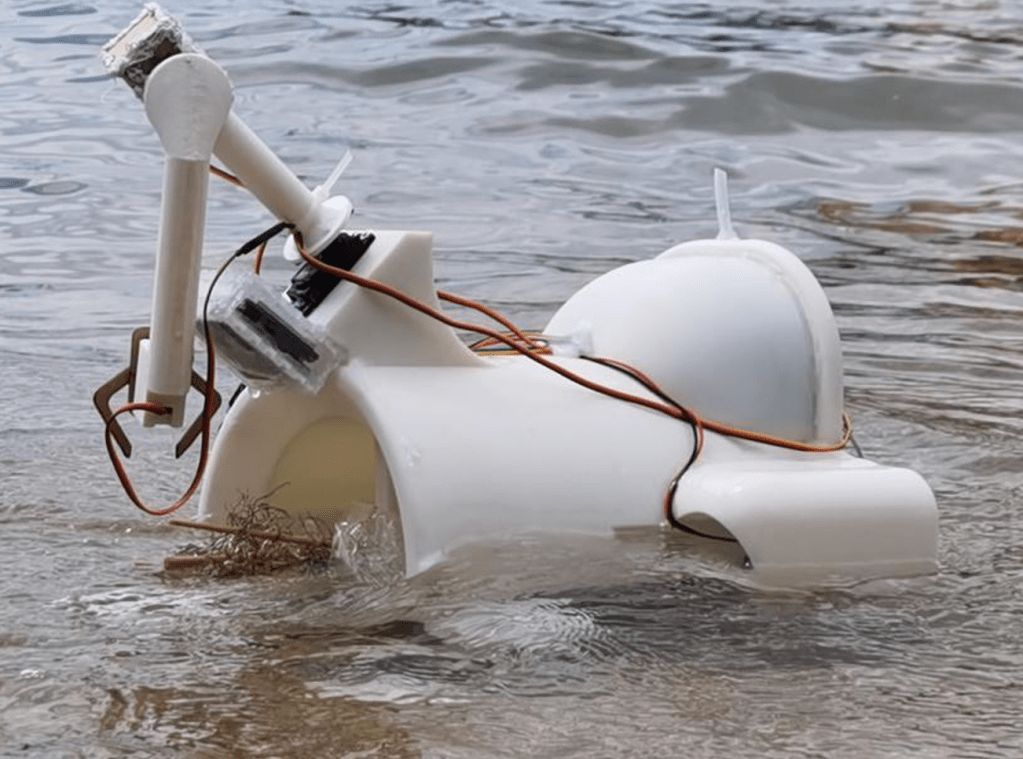
16.结束后与村民沟通防水技术和密封问题

5.应用了哪些科学方法、技术手段与工具
应用原理包括:
水的浮力,通过计算机器人的体积和排水,预估产生的浮力以达到悬浮平衡状态。
杠杆原理,通过设计齿轮和抓手的结构,完成舵机控制机械手抓。
力的反作用力,通过推进器控制机器人在水下的运动和工作。
使用工具:
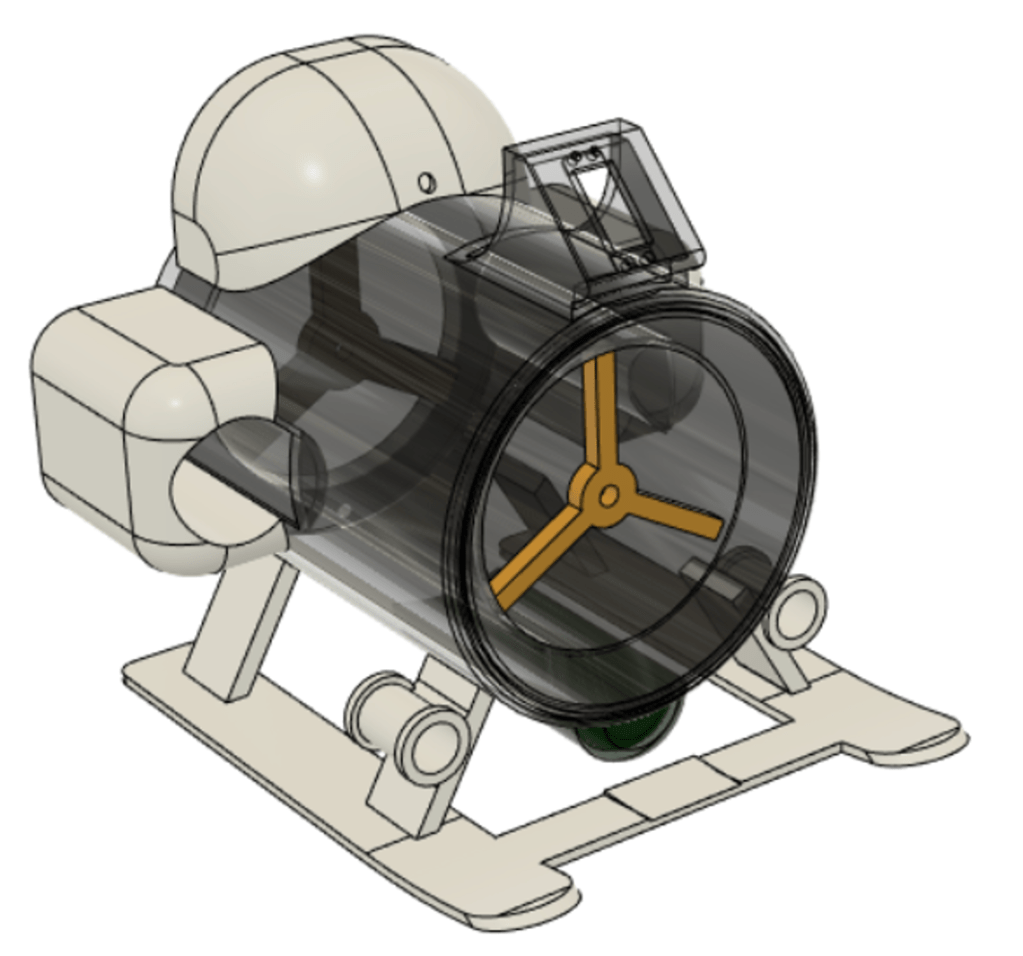
1.123Design设计机械臂和第二代的外观
2.使用激光切割制作安装零部件
3.使用mpython完成编程,掌控板完成人工智能的控制。
6.作品的创新点
1.空桶结构容量大,可容纳垃圾3.848L,排水量4.836kg
2.空腔隔层可以抽水进水,动态保持悬浮状态。
3.可以利用人工智能识别垃圾的位置,并利用机械臂清理垃圾。
4.可以利用旋转叉结构,将渔网勾住并搅拌一起,方便回收。
7.进一步完善该作品的设想
1.防水密封做的不够好,摄像头最终还是进水
2.水下容易产生不平衡的状态,因为水箱内部水的状态,容易产生倾斜
3.机械臂的运转防水做的不够好
4.控制器使用的是两个控制器,一个遥控运动,另一个是智能控制,过多占用空间,下次使用一块控制板控制。
5.只能通过水泵进水下潜,无法进气上浮,需要气泵控制潜水器内部空气量从而控制浮潜。
Member:
王紫宸WANG ZICHEN
Advisor:
吴魁WU KUI

留下评论