你好!我是Yifan Zhang,这是我和伙伴Kaibin Liu和Enzhi Huang共同完成的项目,它是一个仿生机械手臂,以下是我们的发明过程分享。
有次我在新闻里看到一个独臂青年的报道,身体的残缺并没有侵蚀他对生活的热爱,在不借助外力的情况下,他能够独立完成衣食住行各个方面,当时我很受感动。
但实际生活中,并不是每位残障人士都能像这位青年这样,有能力通过自身力量维持相对便利的生活。
便利,这个关乎生活日常的基本需求,让不少残障人士深受困扰。
我们希望能发明一个灵敏的仿生手臂,帮助人们完成日常生活中看起来不起眼的任务,从生活细节着手,为人们创造便利生活的可能性。
研究方法
1)调研:
主要有网络查找资料,调研,观看新闻、报刊了解残疾人生活主要困扰。
2)制作:
迭代三代升级,不断优化技术和性能。
3)技术:
3D设计,CAD绘制切割图、Arduino编程。
4)实验:
通过控制变量法进行运动和感应数据的匹配实验。
研究过程
1)确定主题、制作路径,绘制思维导图。
2)第一代版本原型实验,发现机械结构不稳定。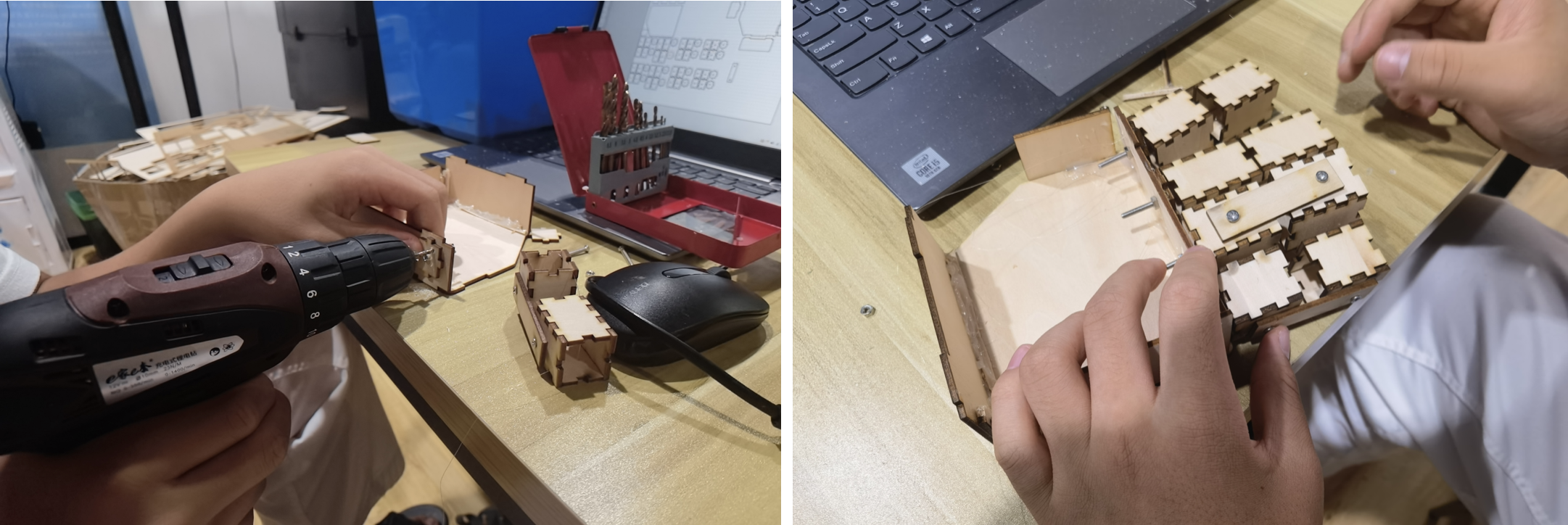
3)第二代原型制作,利用开源3D模型制作手掌机械结构。手指无法正常伸缩,需要进一步调整机械结构。
4)经过调研,手指的结构是联动课可以弹回的结构,使用激光切割快速重新测试原型,并使用Arduino编程,可以正常运作。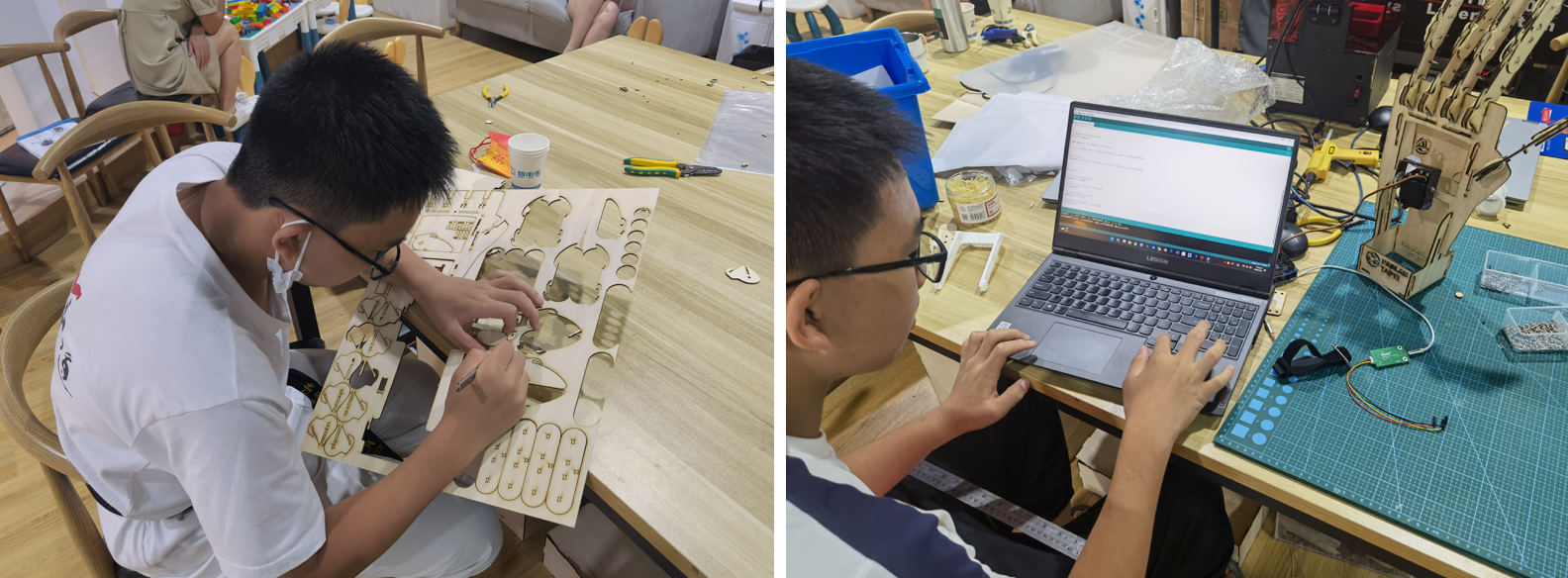
5)结合前三代原型,总结问题,并重新设计手掌,手腕结构,舵机连接件等。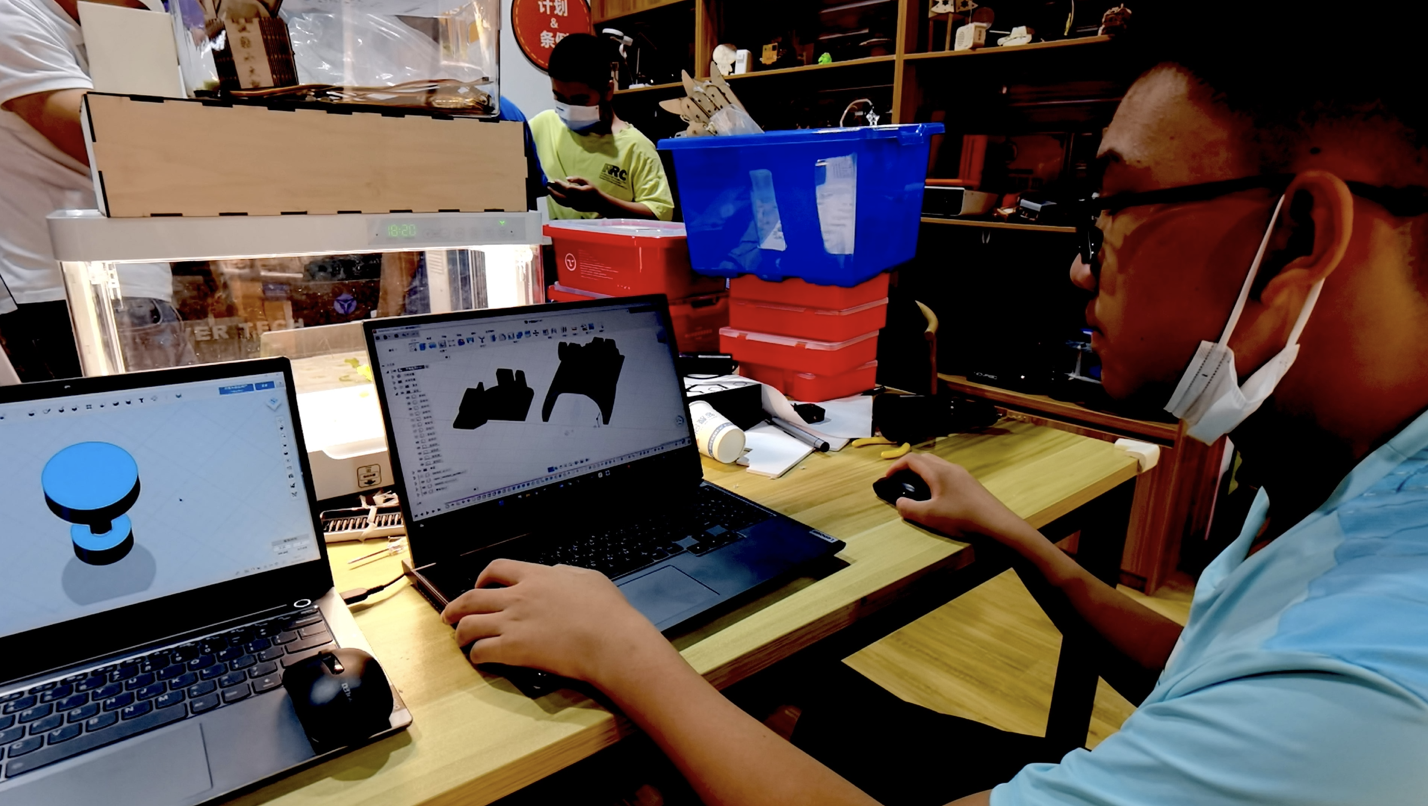
6)安装、焊接、测试、绑线,调试。
7)设计肘部结构。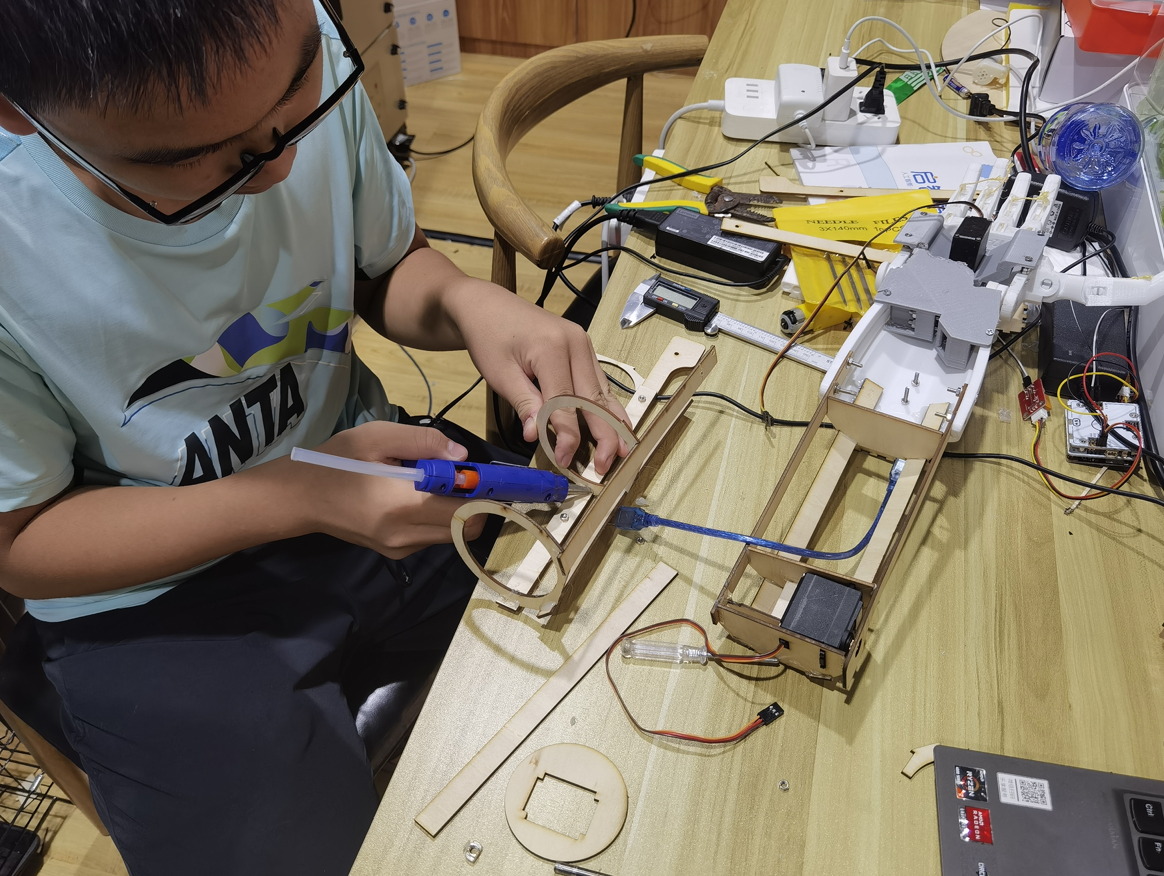
8)整体完成。
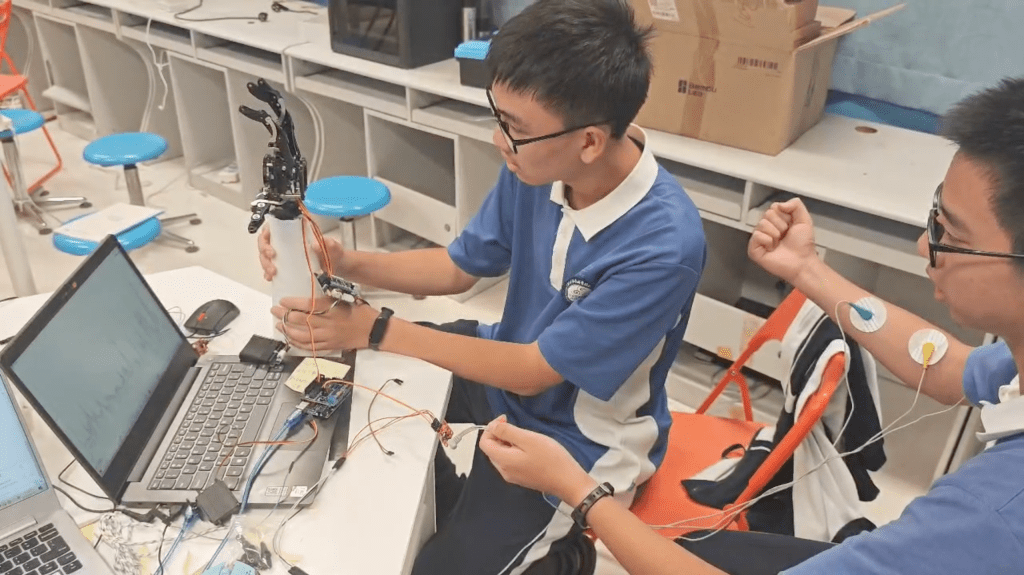
9)编程,测试肌电信号,并成功实验。
10)第三代迭代升级。
肌电传感器原理介绍
项目中选择了干电极肌肉电EMG传感器,其具有使用寿命长久、应用范围广、操作相较于同种传感器更简单等优点,其原理如下图。
成果展示
[视频]
2024年10月
ZhuoYu Maker Education

留下评论